Guillaume1000R
Membres du bureau
-
Inscription
-
Dernière visite
-
-
Waw, le niveau de détails est très sympa. Je trouve personnellement que c'est très (trop) monochrome, il y a de la couleur à aller chercher dans la galaxie et les étoiles, par contre attention à pas faire trop pop le fond de ciel. Tu pourrais crop la vilaine étoile à gauche ;) En tout cas, belle prise.
-
Sujet clos
-
-
-
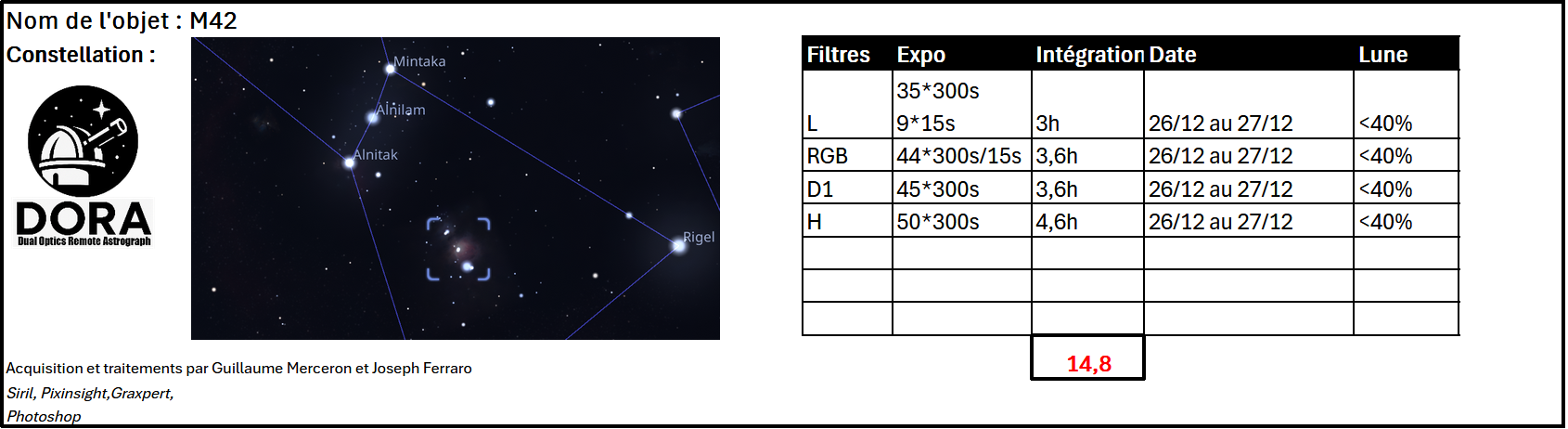
📍 Identité & localisationNom : Nébuleuse d’Orion Catalogue : Messier 42 (M42) Constellation : Orion Type : Nébuleuse diffuse à émission + réflexion Distance : ~ 1 350 années-lumière Taille réelle : ~ 24 années-lumière 👉 Visible à l’œil nu comme une petite tache floue dans l’« épée » d’Orion, sous la ceinture. 🌟 Une pouponnière d’étoilesM42 est une région de formation stellaire active : Le gaz (hydrogène principalement) est ionisé par des étoiles très jeunes et massives Elle contient des milliers de proto-étoiles Des disques protoplanétaires (proplyds) y ont été observés — futurs systèmes planétaires C’est un véritable laboratoire astrophysique à ciel ouvert. ⭐ Le TrapèzeAu cœur de M42 se trouve l’amas du Trapèze : 4 étoiles principales (θ¹ Orionis A, B, C, D) La plus dominante : θ¹ Orionis C, une étoile très chaude de type O Ce sont elles qui « allument » la nébuleuse en ionisant le gaz Sans le Trapèze, M42 serait bien plus sombre. 🎨 Couleurs & structureEn imagerie (et un peu visuellement) : Rouge → Hydrogène ionisé (Hα) Vert/bleu → Oxygène ionisé (O III) Zones sombres → poussières absorbantes Voiles, fronts d’ionisation, piliers → interactions vent stellaire / gravité La structure est extrêmement complexe, avec beaucoup de relief en 3D. 🔭 ObservationŒil nu : visible sous un bon ciel Jumelles : forme ailée évidente Petit télescope : détails internes + Trapèze Filtres : UHC / OIII très efficaces 👉 C’est souvent le premier objet “wow” pour les débutants… et un incontournable pour les experts. 📸 AstrophotographiePourquoi elle est si populaire (et si piégeuse 😄) : Très lumineuse Dynamique énorme (cœur brûlé vs extensions faibles) Parfaite pour : HDR poses courtes + longues narrowband (HOO, SHO) Résiste étonnamment bien aux ciels pollués Même les astrophotographes chevronnés y reviennent régulièrement. 🧠 Fun factsCharles Messier l’a cataloguée en 1769 Observée et étudiée intensivement par Hubble, JWST Elle fait partie du complexe moléculaire d’Orion, l’une des régions de formation stellaire les plus proches de la Terre 📸 L'image

-
A vendre, Sony A7S mk1 en kit 28mm f2, 20000 déclenchements. 600€ Non défiltré, utilisé principalement en très grand champ avec le samyang 14. Je comptais le faire défiltrer mais quand je sors avec je ne fais pas de nébuleuses. Bon état général, quelques traces d'usure cosmétiques. Tous les boutons fonctionnent parfaitement. Vendu en lot avec: 5 batteries une résistance chauffante pour objectifs la fausse batterie 12v le sac d'origine le kit d'origine 28mm f2 et l'extendeur 0.75x pour ce même kit. Possible de rajouter un tamron 28-200 f2.8/5.6 Di III RXD pour 450€ supplémentaires.





-
Petit ménage de printemps ici comme vous pouvez le constater. Je vends mon Samyang 135 que je sous-utilise totalement. TBE 350€


-
Hello, A vendre une ZWO 224MC gros format. Idéale pour du planétaire même si il y a mieux maintenant. Idéale pour une allsky, vendu avec le fisheye 2.1mm. Eventuellement potable en cam de guidage, MAIS couleur MAIS un peu petite. 120€


-
Update 2026 :)
-
Fiche d’identité de M101 (la galaxie du Moulinet)Nom officiel : M101 (Messier 101), aussi appelée NGC 5457. Type : Galaxie spirale dite “à grand disque” (spirale de type Sc). Localisation : Constellation de la Grande Ourse, non loin de l’astérisme du Grand Chariot (la “casserole”). Découverte : 1781 par l’astronome français Pierre Méchain, ami et collaborateur de Charles Messier. Distance : environ 21 millions d’années-lumière. Diamètre : environ 170 000 années-lumière (notre Voie lactée en fait 100 000). Nombre d’étoiles : probablement plus de 1 000 milliards (soit encore plus que dans la Voie lactée). Magnitude apparente : 7,9 (elle est donc trop faible pour l’œil nu, mais accessible aux télescopes amateurs). 🌌 Caractéristiques remarquablesStructure en spirale Ses bras spiraux sont très ouverts et riches en régions HII (nuages de gaz ionisé où naissent de nouvelles étoiles). Ces zones apparaissent roses/rouges en photo longue pose. Formation d’étoiles intense C’est une galaxie très active : de nombreuses étoiles massives et jeunes s’y forment. C’est pour ça qu’elle a beaucoup de régions brillantes. Galaxie asymétrique Sa forme est un peu “déséquilibrée”. Les astronomes pensent que c’est dû à l’interaction gravitationnelle avec de petites galaxies satellites voisines. Supernovae M101 a accueilli plusieurs supernovae observées depuis la Terre. La plus récente, SN 2011fe, était particulièrement brillante et a beaucoup servi aux chercheurs pour mesurer les distances dans l’Univers. 🔭 Observation pour les amateursAux jumelles : difficile à percevoir, juste une tache diffuse. Avec un télescope de 150 mm sous un ciel noir : on voit un disque nébuleux. Avec de plus grands télescopes ou en photo : on commence à distinguer ses bras spiraux et ses détails spectaculaires. 👉 En résumé : M101 est une géante spirale voisine, plus grande que la Voie lactée, remplie de zones de formation d’étoiles, légèrement déformée par ses voisines, et une véritable perle de l’astrophotographie. 📝Commentaires de la prise de vue Elue sujet du mois Avex en mai dernier? on a pointé DORA sur M101 en LRGB un peu pour rigoler entre deux objets. J'y ai rajouté mon signal Ha fait dans le Vexin en 2022 pour une quarantaine d'heures. J'ai volontairement poussé le signal Ha pour distinguer les nébulosités qui accompagnent la galaxie, chose assez peu imagée sur astrobin. J'ai longtemps mis le traitement en pause car non satisfait de l'intégration de notre couche L, force est de constater que la nuit porte conseil. 📷 L'image

-
Utilisé en solaire en version PRO, c'est vraiment top. Joli déterrage btw :)
-
-
Hello, Suite à la mise en remote de la FSQ je vends mon extendeur et réducteur. Possible de déloter bien entendu. Pack réducteur pour FSQ 106 EDX et 85 à priori. : 735€ Mon ancien train optique avant la mise en remote de DORA. Vous calez votre roue a filtre et la cam derrière l'OAG et zou. Diviseur Optique M68 TS-Optics Off Axis Guider with ZEISS M68x1 connection - short design + Focuseur helicoidal ZWO – (valeur 192 euros + 75 euros) -> 160€ Bague tilt M68 Skymeca – 4 points de réglages externes – (valeur 220 euros) -> 130€ Adaptateur photo CA35 M72 (valeur 63 euros) -> 40€ Réducteur RD-QE 0.73x (valeur 750€) -> 350€ petite rayure de l'ancien proprio, sans conséquence sur de l'APSC, à vérifier en FF mais l'ancien vendeur m'a confirmé que non à l'époque, jamais vérifié pour ma part car en 2600MM uniquement... Bague de conversion M56/M68 (Usiné) -> 55€ Télé-extender Taka APO 1.5x (valeur 535 euros, neuf servi 1 fois) -> 320€





-
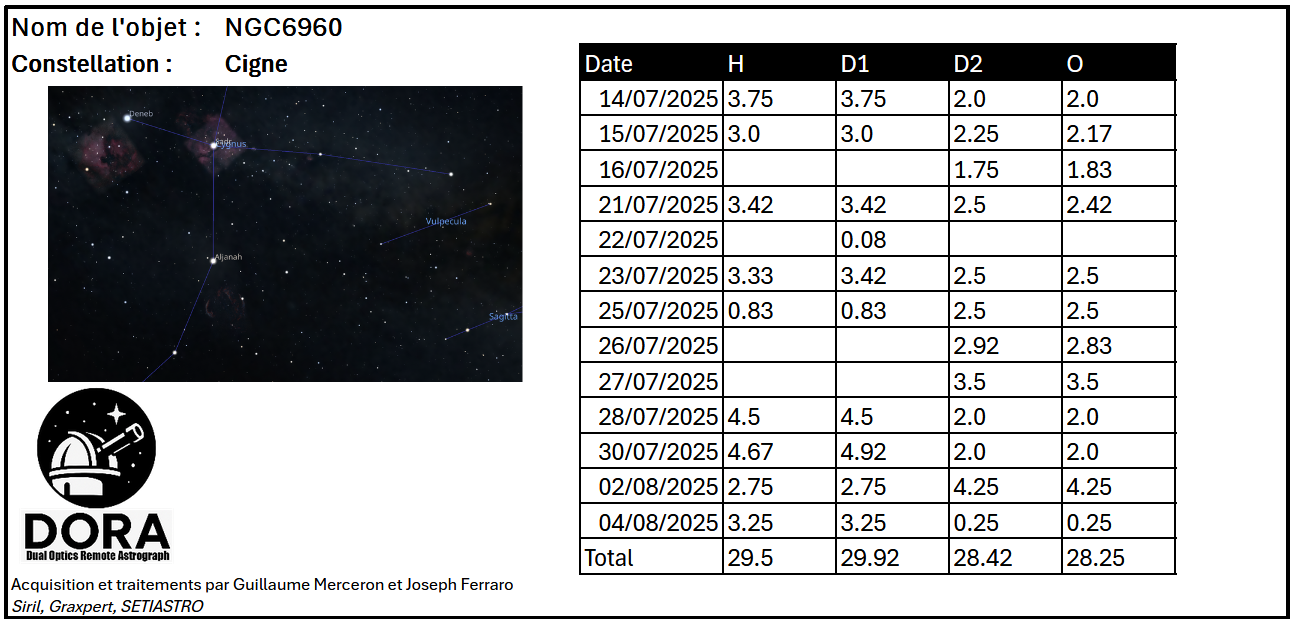
🔭 IdentificationNom(s) : Dentelles du Cygne, Voile de Cygnus, Veil Nebula, Cygnus Loop. Objets principaux : NGC 6960 → le « Balai de sorcière » (partie ouest, près de 52 Cygni). NGC 6992 & NGC 6995 → l’arc est, très lumineux. NGC 6974 & NGC 6979 → zones plus diffuses entre les deux. Pickering’s Triangle → région triangulaire complexe au nord. Type : reste de supernova (supernova remnant). Constellation : Cygne (Cygnus). Distance : ~ 1 500 années-lumière. Taille réelle : ~ 130 années-lumière de diamètre. Taille apparente : près de 3° dans le ciel → soit 6 pleines lunes mises côte à côte. 🌠 OrigineIl y a environ 10 000 à 20 000 ans, une étoile massive (probablement > 20 M☉) a explosé en supernova. Le cœur s’est effondré, l’onde de choc a balayé le milieu interstellaire environnant, créant un gigantesque réseau de filaments de gaz ionisé. Ce réseau est ce qu’on observe aujourd’hui comme les Dentelles du Cygne. 🎨 ApparenceLes filaments sont extrêmement fins et colorés : Rouge (Hα, soufre) → hydrogène excité. Bleu-vert (OIII) → oxygène doublement ionisé. À l’œil nu → invisible. Dans un télescope de 200 mm + filtre OIII ou UHC → de longues volutes deviennent visibles. En astrophotographie → c’est un terrain de jeu extraordinaire : chaque zone révèle une dentelle lumineuse, presque textile. 🛰️ Intérêt scientifiqueÉtudier les Dentelles permet de comprendre : La dynamique des ondes de choc interstellaires. L’évolution des restes de supernova. La chimie du gaz interstellaire (abondance d’oxygène, hydrogène, soufre). C’est un laboratoire naturel de physique des plasmas à grande échelle. ✨ Vulgarisation / imagerie poétiqueOn peut imaginer les Dentelles du Cygne comme une cicatrice cosmique : la trace lumineuse laissée par la mort d’une étoile géante. Elles s’étirent dans le ciel comme une toile d’araignée céleste, une plume incandescente figée dans l’espace, mais qui continue en réalité à se dilater lentement. 📝Commentaires de la prise de vue Cette composition des dentelles du cigne a été faite en 4 tuiles pour une image finale de 10714x7237 pixels. La proposition formulée est un Foraxx (compilation de HOO et SHO) Malheureusement pour vous, l'image présentée ici sera un JPEG de 20meg, le forum n'acceptant pas les 109Meg de l'image PNG :) 📷 L'image